The Research
Thank you for visiting the website of the Robotics Swarm Research Group at Valparaiso University! We invite you to learn more about the research activity that our group is engaged in. Feel free to check the descriptions and videos of the various projects. If you are interested in more technical details, you can download the pdf posters and papers in the “Publications and Presentations” section. Finally, you can visit our “The Team” section to meet our team members. Please do not hesitate to contact us if you have any additional questions or suggestions.
Ant Colony Optimization
The Ant Colony Optimization (ACO) algorithm is an evolutionary algorithm that bio-mimics the behavior of ants in finding the shortest path between an origin and a destination within a set of pre-determined constraints.
The goal of this project is to create a small-scale application of the ACO using a swarm of small autonomous robots. The concept was first investigated using a computer simulation. As can be seen in this clip, three paths exist between the origin (Green circle) and the destination (Red circle). Using the ACO algorithm, after several iterations, all 6 mobile agents eventually converge to the shortest path.
Once verified in simulation, we investigated the practical applicability of the algorithm in real-life situations by addressing the issues and challenges encountered in the transition from the modeling/simulation level to the real-life application of the algorithm. These issues include, collision avoidance, position tracking, and wireless communication interference between the robots. We also suggest some modifications that will make feasible the implementation of the algorithm on the robots’ limited computing systems.
The results shown in this clip demonstrate that our modified algorithm, when implemented with a small robotic group of 3 robots can successfully identify the shortest path between two points. These results open the door to a wide variety of applications like search & rescue, path planning, and mass transportation.
Autonomous Local Identification
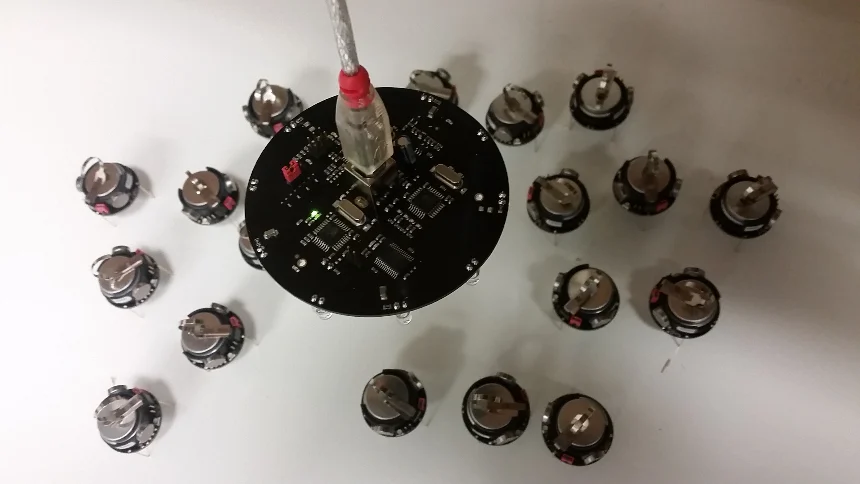
With the emergence of swarm intelligence, system designers are creating robotic swarms of continuously increasing sizes. As the size of a swarm increases, it is imperative to have a uniform program collectively downloaded on all the agents in it. These uniform programs impede the designer’s ability to designate distinct identities for various agents in the swarm. Kilobots are a good example for these large size swarms. As can be seen in the figure below, they are collectively programmed using the same controller and a uniform program.
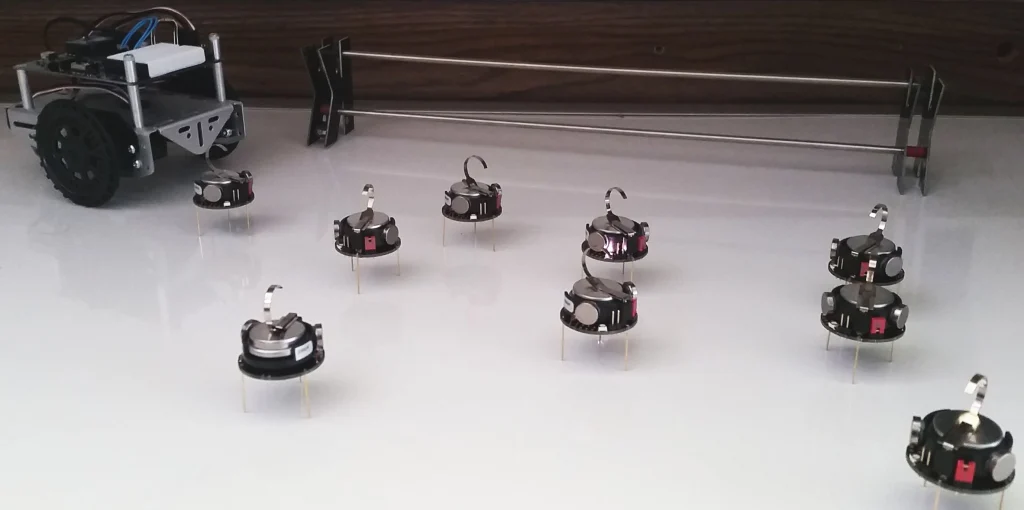
In this project we developed and tested an algorithm that, when implemented in a robotic swarm, allows the locally interacting agents to autonomously designate unique identifications to each other at run time. The obtained results show that when used on a small swarm of autonomous robots, running the algorithm led to a steady state where every agent in a local neighborhood was assigned a unique identification value. This can be seen in the video where each identification value is represented by one color flashing on the top of the robot. The video shows that after several iterations, the swarm reached a steady state where no interacting robots were flashing the same colors. Click here to watch the video
Robotic Dance Team
The University of Notre Dame, hosted the intercollegiate robotic football championship. In this championship, several collegiate teams competed for the Brian Hederman Memorial Trophy. In each game, two teams of robots, each consisting of eight robots on the field at a time compete in a game of modified rules football.
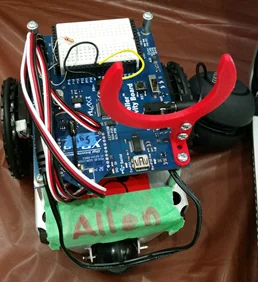
In preparation for the robotic football competition this year, one of our research teams decided to create a robotic dance team to complement the football playing robots. In order to create this team, a team of 10 Activitybot robots were assembled, calibrated, and programmed to move in designed routines. The video linked here shows a short routine involving three of the robots.
The robots were also modified to enable them to play music (just like a marching band). As can be seen in the figures below, a speaker was mounted on each robot. A support structure was 3D printed in our lab for these speakers.